
Status : Ongoing
Tags: featured simulation kinematics
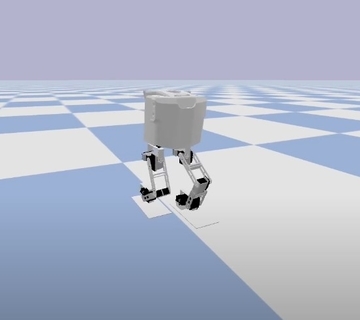
Design and Simulation of a Bipedal Robot in PyBullet using Inverse Kinematics.
Python
PyBullet
Fusion 360
In this project, we have tried to mimic the human walk using a 12- DOF biped robot in PyBullet simulation. The entire model of the robot has been designed in Fusion 360 and imported into our simulation. We used Fusion2Bullet add-in to convert our CAD model to URDF. The robot can walk in a straight line in any direction (forward & reverse) and turn left or right, which is done using Inverse Kinematics, as you can see in the video.
Team Members: