
Status : Completed
A robot detects a target with a camera's help and shoots a bullet by rotating in the target's direction.
Arduino
OpenCV
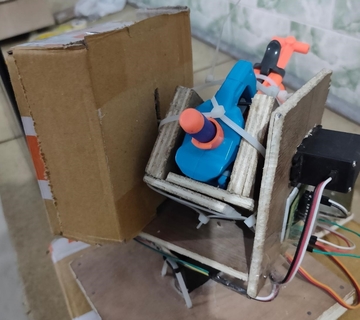
The functioning of the project is divided into many different steps. In the first step, the robot detects the target with the help of a camera using specific parameters. Then the design of the robot is such that the firing system rotates the system towards the target and fires a bullet after detection. The entire process is controlled by raspberry pi and Arduino UNO. The whole setup has two servo motors that rotate the body of the robot on which the gun is mounted while the base remains intact in its respective position. The mounted part is equipped with a 5 MP Raspberry Pi 3 depth B camera to detect and identify the target aptly.