
Status : Completed
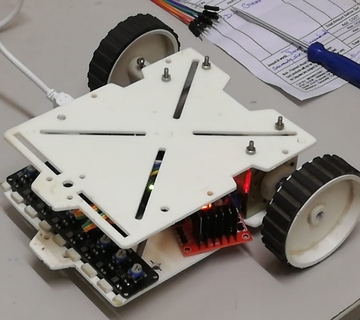
The project aims to create an advanced line follower robot. able to solve a maze (with no loop) and compute the shortest path back from end to start. the robot also to detect the colored patches.
Arduino
IR Sensors
The project aims to create an advanced line follower robot. able to solve a maze (with no loop) and compute the shortest path back from end to start. the robot also to detect the colored patches.
Main Technologies used in the Project:
Practical Applications and Uses:
Advantage :
1) These types of robot movement are usually automatic.
2) The system in the robot is like Once installed and forgotten.
3) It's relatively cheap.
4) This type of robot is simple to build.
5) They can also be used for long distances.
Application:
1) They can be used in industries as automated equipment carriers..
2) It can be used for home for floor cleaning etc.
3) In hotels they are being used for the transfer of things from one place to another following a straight path
Project by: Team !ABHIMANYU