ATV + Soil Sampling
Status : Completed
featured kinematics
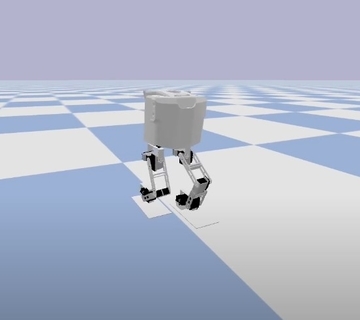
Design and Simulation of a Bipedal Robot in PyBullet using Inverse Kinematics.
Status : Ongoing
featured simulation kinematics