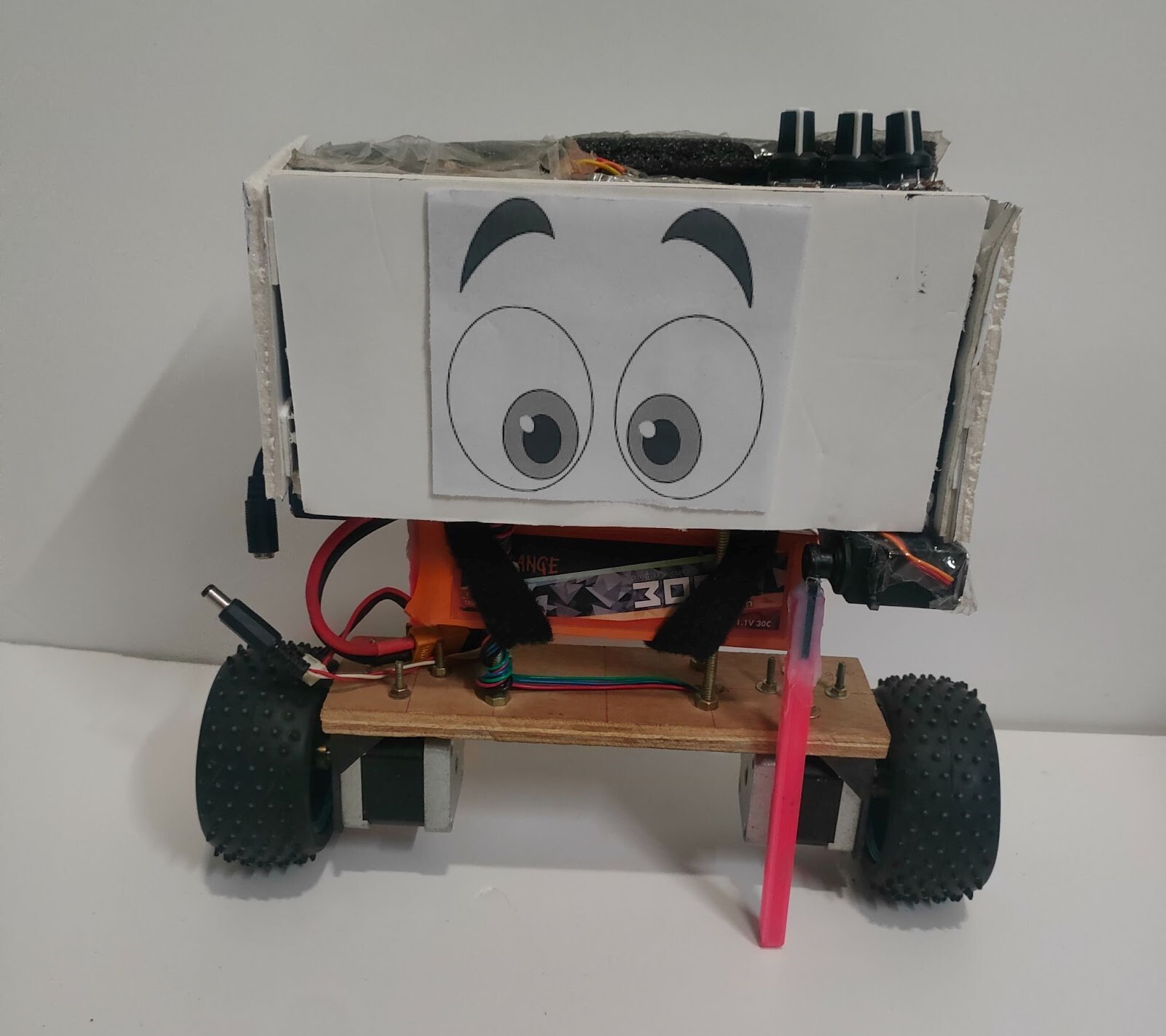
To balance a robot on two wheels at its normal position and control its movement through an Android app.
Status : Completed
bluetooth mpu Arduino kalman_filter PID