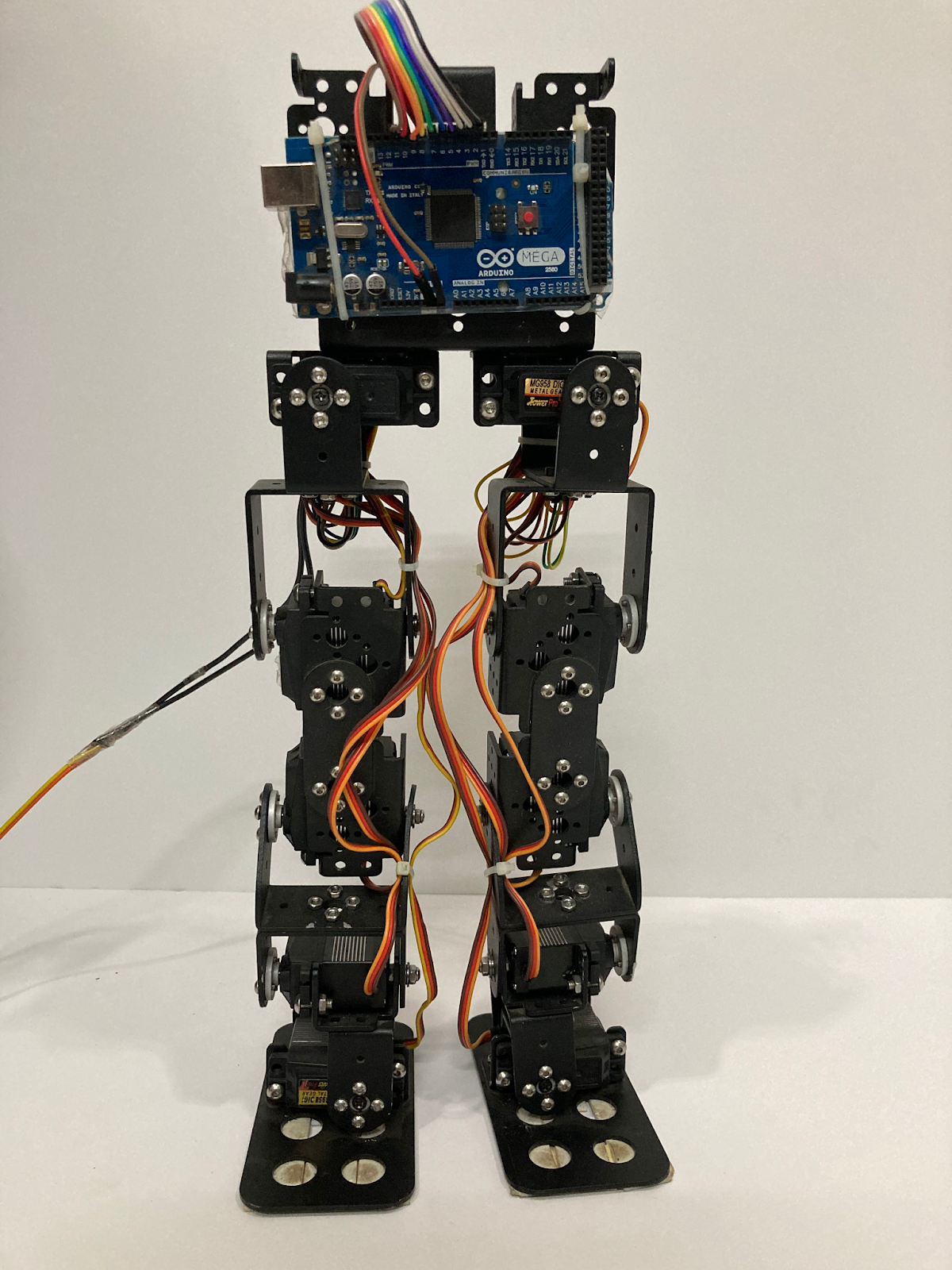
To design and build a bipedal robot by synthesizing the gait of a planar biped walking on a level ground.
Status : Completed
arduino biped Inverse_kinematics servo